自动控制系统
(terminology::Automatic Control System)
自动控制:有意识的进行人工设计,使得控制过程不需要人的参与,从而自动进行
控制:使受控对象的受控变量产生预期响应
- 受控对象:物理系统
- 受控变量:受控对象的物理量
- 预期响应:预先设定的期望信号,预期系统对输入信号或扰动的理想响应
- 系统响应:系统实际输出的变化
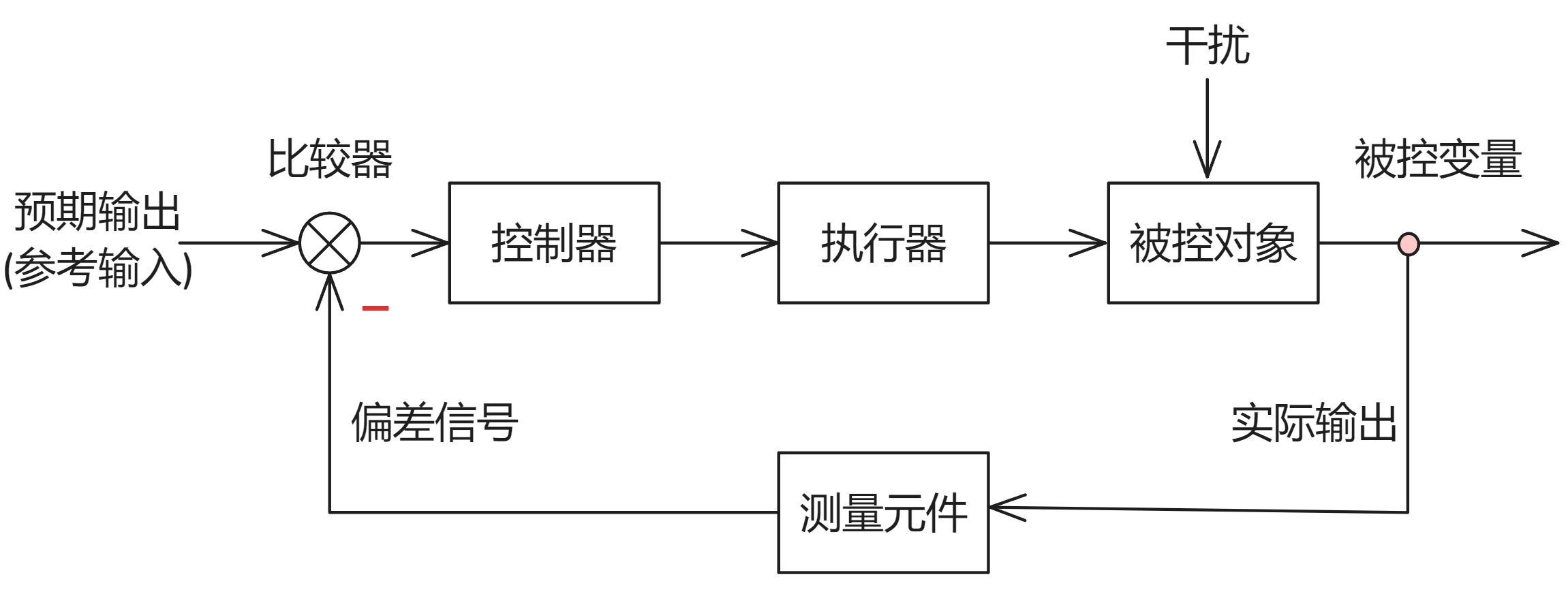
基本框架
- 描述系统平衡时的状态
- 平衡态被打破后,应用闭环/反馈的思路来解释如何重新实现平衡
- 如果有前馈/顺馈,解释如何有助于维持系统的平衡
- 预期输出/参考输入
- 控制器:代替人脑 (中的部分功能),进行分析判断决策
- 执行器:将控制信号转化为相应动作或操作的硬件装置或组件
- 被控对象:要求实现自动工作的机器﹑设备或生产过程
- 被控变量:达到控制目标要求的被控对象的某个工作状态或参数
Note
- 注意 因果关系判断控制的过程:明确所要求的是什么(目的,预期,被控对象的被控变量)
- 注意:被控对象为实际的物理系统/实体对象
例如:被控对象为“水箱”(是控制水箱而不是控制水)
控制的基本机制
反馈:反馈的基本原理是通过不断比较系统输出与期望参考值之间的差异,从而对系统进行修正和调整
顺馈/前馈:利用先验信息对系统期望响应预判
- 按扰动补偿:直接抵消系统中的扰动
- 按输入补偿:通过调整输入信号来抵消扰动
开环控制:利用执行机构直接控制被控对象,控制器无反馈信息
闭环控制:存在测量装置组成反馈回路,控制器利用反馈信息
反馈控制:采用负反馈,利用偏差进行控制的过程
扰动:对系统控制产生不利影响的输入信号。除给定信号外,作用在控制系统各环节上的一切会引起输出量变化的因素都叫做扰动
- 内扰:系统内部产生的扰动
- 外扰:系统外部产生的扰动
自动控制系统的分类
1. 按控制的方式:
- 开环控制
- 闭环控制
- 复合控制
2.按系统特性:
- 线性连续控制:微分方程
- 线性离散控制:差分方程
- 非线性控制:非线性方程
3.按输入量变化规律:
- 恒值控制:调节器
- 随动控制:跟踪系统、伺服系统
- 程序控制
4.按输入/输出个数
- SISO:单输入单输出系统(单变量系统)
- MIMO:多输入多输出系统(多变量系统)
基本性能要求:稳、快、准
1. 稳定性
系统正常运行的先决条件,由系统结构和参数决定,与外界因素无关。
被控量偏离期望值的初始偏差应随时间的增长逐渐减小并趋于零。过渡过程,呈现振荡形式,振荡逐渐减弱达到平衡。
2. 快速性
动态性能:过渡过程的时间和最大振荡幅度
3. 准确性
稳态误差:被控量的稳态值与期望值之间的误差(由于系统结构、外作用形式、非线性因素的影响)